




【機械システム工学科】卒研生、地域志向型自動運転車を開発中!
全国で深刻化している「交通難民」(「買い物難民」とも)の問題を解決するため、ベトナムからの留学生で4年生のNguyen Ngoc Tung君が「地域志向型自動運転車」の卒業研究に取り組みました。機械システム工学科の内田が報告します。
交通難民問題とは、自家用車利用を前提とする都市構造の変化や少子高齢化に伴う地域の過疎化によって、車を持たない人や運転しない人が日常の買い物に出かけるのにも難儀しているという問題です。自動車社会が生み出した負の側面といえるでしょう。
この問題を解決するための自動運転車を実現するには、いくつかの技術課題をクリアしなければなりません。以下、重要な3つの課題を説明しながら卒業研究の結果を紹介します。

課題1 小型・シンプルで安価なシステム構成
自動運転車というと、高度なセンサーをいくつも搭載した先進的な自動車というイメージがあると思います。しかし、地域の足となる自動運転車は高齢者などの交通弱者が地域の道路で利用するため、なるべく小型かつシンプルで、しかも低価格で実現できるシステム構成とする必要があります。
そこで、自動運転用のコントローラとしてよく知られた機種の360度カメラを用いることを考えました。このカメラは、全天・全周を1度に撮影できるうえ、ユーザーがプログラムを書き込めるので、自動運転のプログラムを書き込めば、これ1台で自動運転用センサー兼自動運転用コントローラの機能を果たせる可能性があります。

このカメラを取り付けた電動カートなども作りかけていますが、まずは実現可能性の検証のため、下の写真のようなミニチュアの二輪車の製作を先行的に進めました。ハードウェアは完成しましたが、残念ながら時間不足のため、ソフトウェアの方は完成できませんでした。

課題2 白線や道路形状によらない道路認識
多くの自動運転技術では、道路上の白線や道路形状の特徴(車からは台形状に見える)をとらえて道路を認識するのですが、地域の道路ではその手が使えません。そこで、人工知能の利用を考えました。人間は白線がない道路や不定形の道路でも、ちゃんと道路を認識できますね。それをコンピュータに肩代わりさせるわけです。

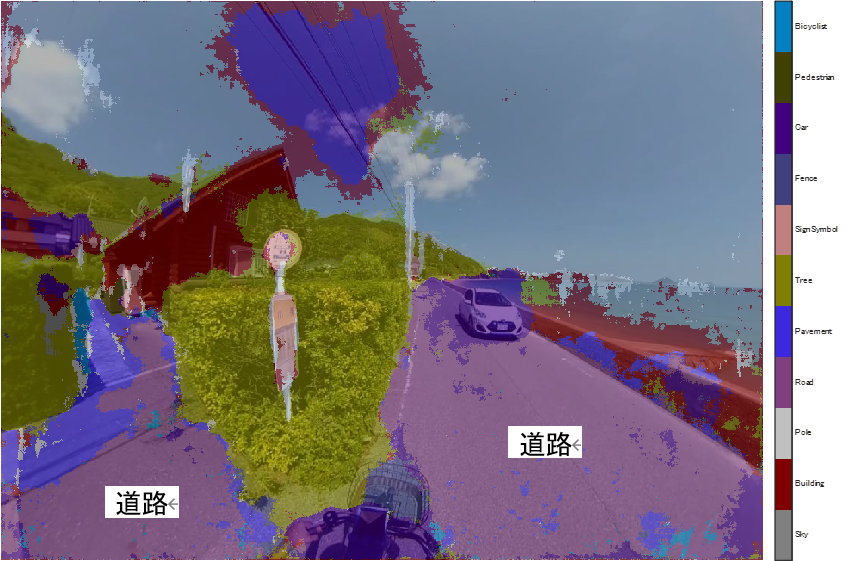
インターネット上で公開されている道路認識用のデータを利用しました。下は、360度カメラで撮影した写真(上段)で道路認識を行った例(下段)です。この例ではうまく道路の部分を認識できましたが、道路上に大きな影が映った写真などの場合はうまくいかないことがわかりました。

課題3 簡単に使える自動運転
運転操作にも人工知能が不可欠です。人工知能の学習方法には、模倣学習と強化学習があります。自動運転で言えば、前者は人間の運転操作をコンピュータに覚え込ませるやり方です。そして、後者は良い運転をしたときはプラス点を与え、悪い運転をしたときはマイナス点を与えることで、コンピュータに自ら運転の仕方を学ばせるやりかたです。

模倣学習は、たくさんの運転データを収集する必要がある点などが地域志向型自動運転に適しません。逆に、強化学習の欠点は実際の道路上で実施できないことです(危険のため)。試しに自動車シミュレータを用いて強化学習を行った後に自動運転のシミュレーションを行ってみると、学習が不足していたらしく、ふらふら蛇行する自動運転になりました(下の写真)。強化学習では、学習に非常に時間がかかることを知らされました。

目標とする自動運転を実現するには、まだいくつものハードルを越えなければなりません。Tung君はこの1年間、複雑で根気の要る研究にまじめに取り組んでくれました。来年度は、2名の卒研生がこのテーマに挑む予定です。Tung君の成果を引き継いで、さらなる研究の飛躍が得られることを期待しています。 
学長から一言:ベトナムからの留学生のTung君も、コロナに負けずがんばりましたねッ!課題の完全解決に至らず卒業となりますが、次の卒研生が、Tuang君の成果を土台にして、またがんばってくれるようですので、Tung君も、期待してください!
この記事をシェアする
