



【機械システム工学科】卒業研究の成果-折紙ロボット誕生!
近年、日本の伝統工芸である折り紙を学問に発達させた「折紙工学」が注目されていますが、それを応用して、卒業研究で、紙でできたロボット「折紙ロボット」を、学生が製作しました。機械システム工学科の内田が紹介します。
下の写真は折紙構造の一種で、紙を折り曲げただけなのに、写真のように比較的しっかりした強さを持っています。

そこで、この折紙構造を組み合わせてロボットを作ることを考えました。折紙構造は蛇腹形をしているので、内部に空気を入れて膨らませることによって、伸縮するアクチュエータ、すなわち人工筋肉として用いることができるのです。
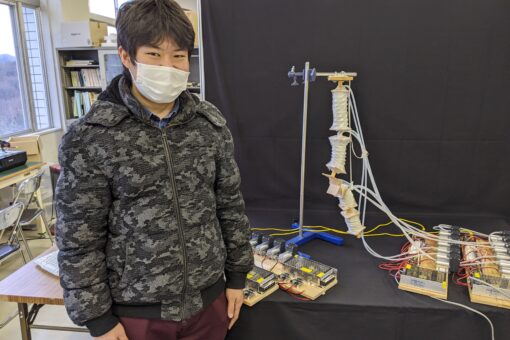
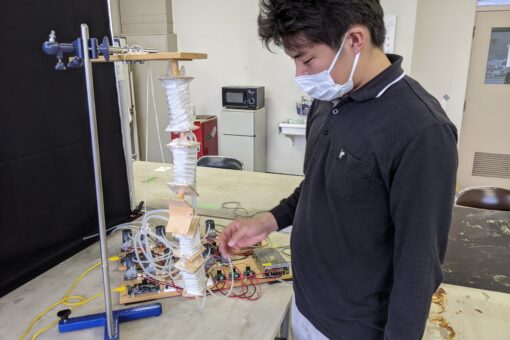
卒業研究のテーマ名は「折紙工学に基づく高効率人工筋肉とその応用による人間親和型ロボット」です。この卒業研究を手掛けたのは、4年生の村上君です。村上君はこの研究を3年生から行っており、今実験室にある折紙ロボットはほとんど彼が一人で作り上げたものです。
ロボットといっても、人間の片腕の形をしたマニピュレータ型ロボットです。「人間親和型ロボット」という言葉が出ましたので、説明しましょう。技術が進歩して仕事場や家庭内にロボットが入ってくるようになると、人の危険を避けるためにロボットはなるべくソフトで軽い材料でできていることが望まれます。そのような人と共存できるロボットが「人間親和型ロボット」です。紙でできたロボットは値段も安く作れるので、この折紙ロボットの技術が完成すれば、介護用など家庭用ロボットとしての実用化が期待されます。
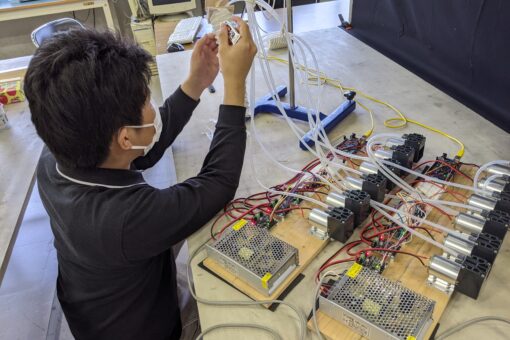
折紙ロボットはコンピュータ制御で動作しますが、コンピュータから動きの命令が出されると空圧ポンプが動作して折紙構造を膨らませたり縮ませたりすることにより、ロボットが動作します。

折紙ロボットの動作をコマ写真で見ていただきましょう。左から右に向かって、上腕部(上2つの折紙)と前腕部(下2つの折紙)をすべて縮めた状態から伸ばした状態に移るところです。少しひねりが入っていますね。
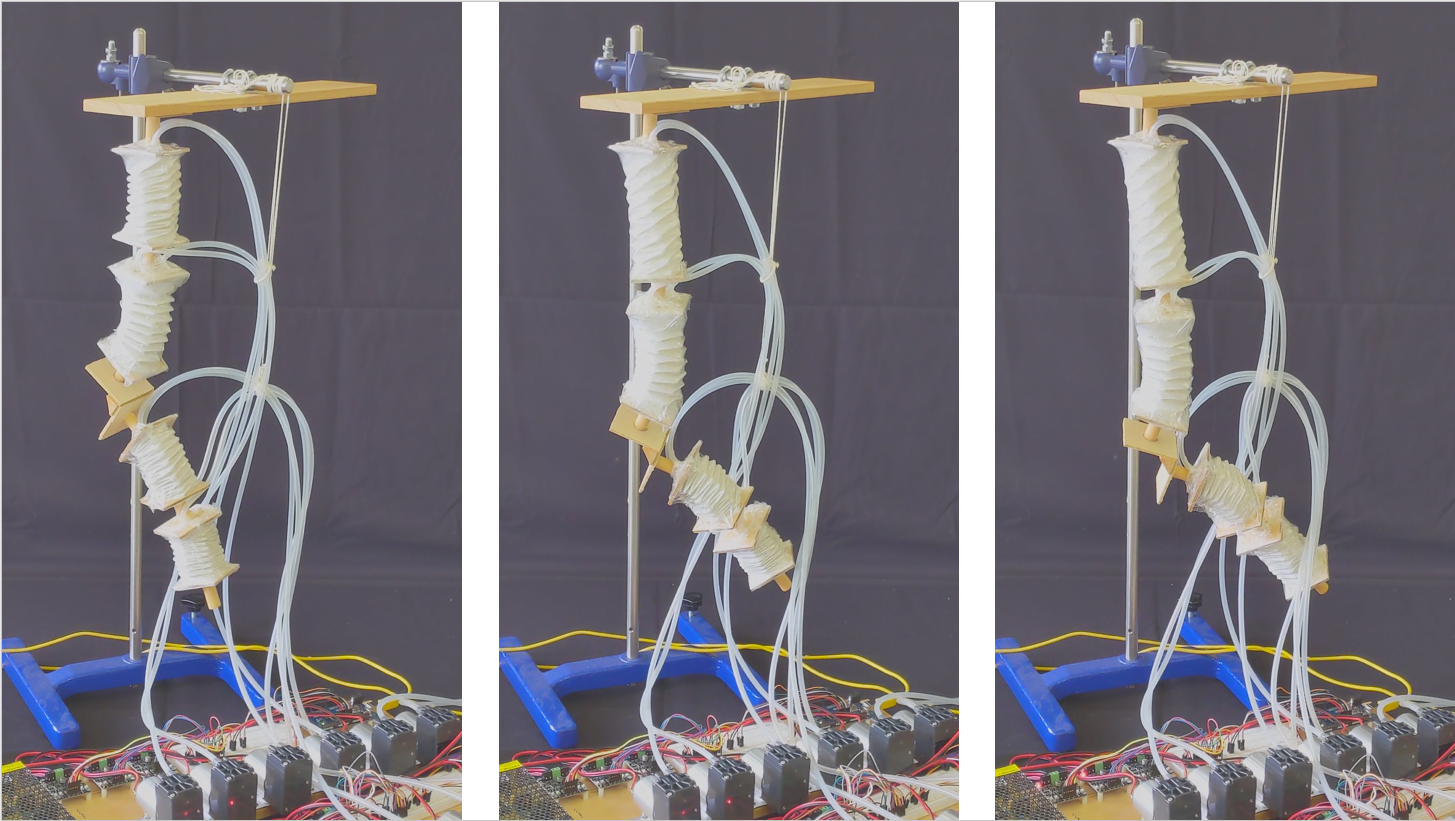
同じ動作を別の角度から見た写真です。
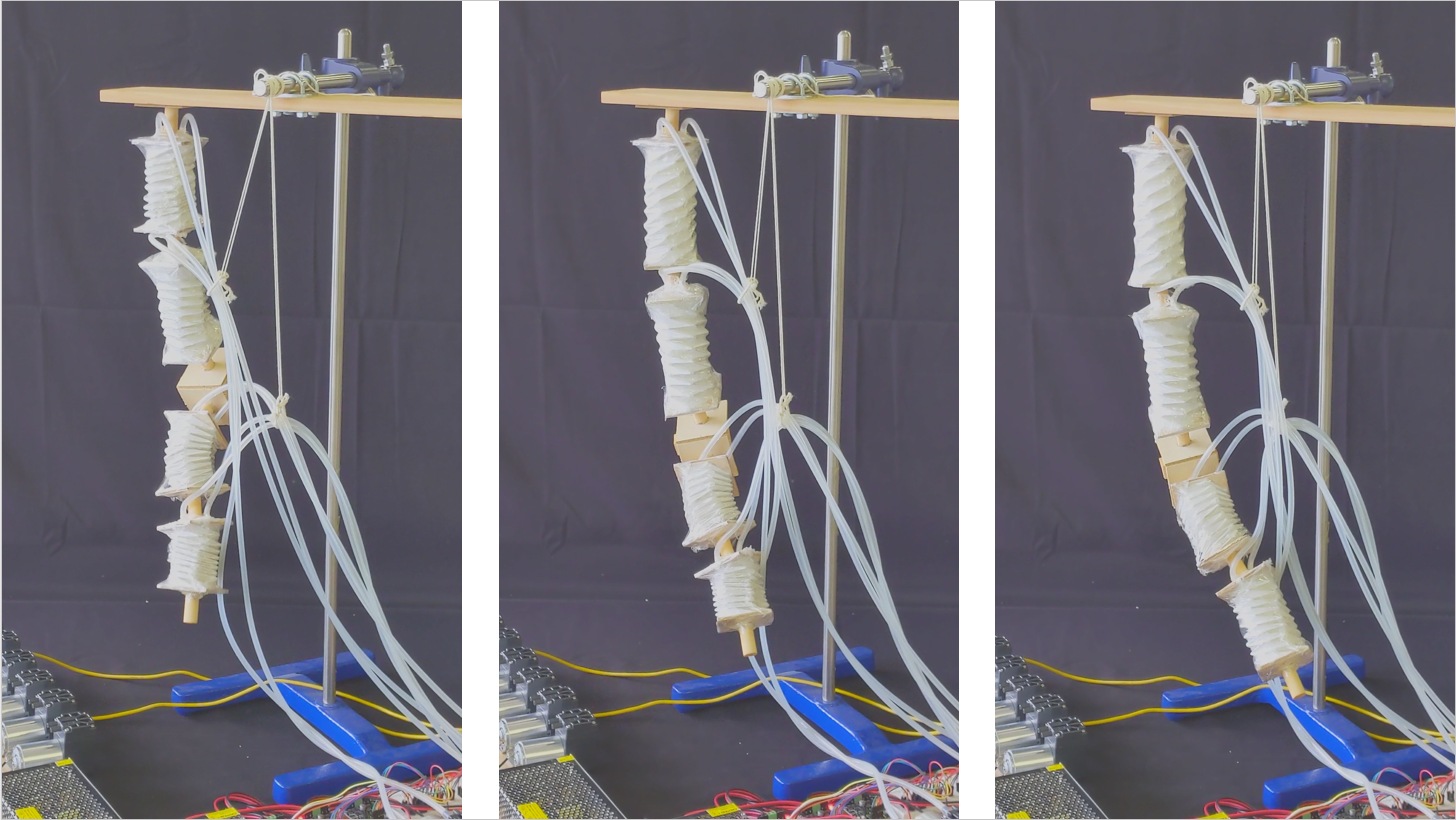
ご覧のように、まだこの程度の動きしかできませんし、L字型を保つはずだった全体形状もロボットの自重のために「く」の字型となってしまいました。これらは、今後改良を必要とする点です。
今回製作したロボットがよりうまく動くようになれば、歩行ロボットなど他の形式のロボットにも応用が可能となることでしょう。今年度の卒業研究の夢は、来年度以降の研究へと引き継がれます。
学長から一言:おもしろいですね~!!!折り紙工学という研究分野があるのですねッ!折り紙という幼児にもなじみのものとロボット工学の結びつきが、とても新鮮!村上君、今後を期待していますよ!!!
この記事をシェアする
