




【機械システム工学科】卒業研究の成果-水中ロボットが潜航!
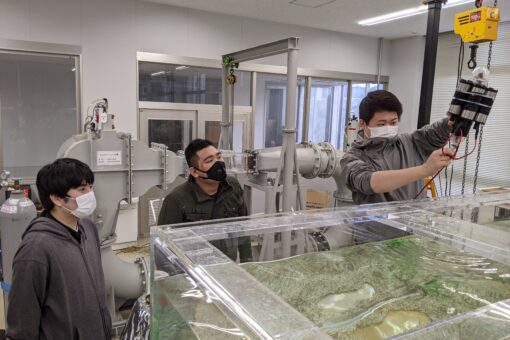
テーマは「瀬戸内海の超遠隔リアルタイム海中探査を目的としたロボットシステム」。卒業研究で製作してきた水中ロボットが、ついに自力で潜航することに成功しました。遠く地上にいながら海中の様子をリアルタイムで見ることができるようにすることが最終目標ですが、今年度は水中ロボットと水上ロボットのハードウェア開発を中心に取り組みました。機械システム工学科の内田が報告します。
卒業研究を行ったのは、写真右端の伊田君(4年生)です。伊田君は1年生の時から「海中探査プロジェクト」に参加していて、この方面のベテランです。他の2名も「海中探査プロジェクト」のメンバーで、中央が中岡君(2年生)、左端が若木君(3年生)です。なお、若木君は新年度の卒研担当者でもあります。
残念ながら、ブログでは潜航の様子を動画でお見せできないので、コマ写真で紹介します。





水中ロボットが撮った水底の写真です。ピント合わせが少しうまくいっていませんが、模型の水草がきちんと撮れています。

水中ロボットは電力を消費するので、実際の使用時には自動車用バッテリーを載せた水上ロボット(下はその組立て中の写真)から電気を供給します。また、水中は電波が通じないため、水中ロボットの映像を地上に送るための中継局の役割も水上ロボットに持たせています。将来は、水中ロボットと水上ロボットは無線接続にする予定です。また、この水上ロボットも水槽内での航行実験で成功済みです。

水中ロボットを自力で潜航させるのは思いのほか大変でした。研究の最初の頃は、鉄の重りを付けて無理やり沈めていたのですが、それでは水中での自由な運動ができません。そのため、船体の重心と浮力のバランスを見直したり、推進器をハイパワーのものに取り換えたり、それが原因で電気回路が壊れたりと、悪戦苦闘の連続でした。
実は、潜航実験の結果を2月12日(金)の卒業研究発表会で発表したかったのですが、発表直前に電気回路が故障したために、かないませんでした。発表会後の実験でようやく成功したので、こうして学長室ブログ上で発表しているというわけです。

また、水中ロボットは内臓のマイクロ・コンピュータによるコンピュータ制御で動いていますが、そのこと自体よりも、小さい船体内に複雑な電気回路をどうやって収めるか、水漏れによる電気回路のショートをどうやって防ぐか、細かい配線のミスをどうやってチェックするかなど、泥臭いところで苦労しました。すべて、実物のものづくりを通じて得られた貴重な体験です。
新年度からは、若木君が卒業研究を引き継ぎます。プロジェクトにも新しい仲間が加わることでしょう。次の目標は、IoTを活用した超遠隔制御と超遠隔探査の実現、AIを応用した自律制御(ロボットが自分の思考で自動的に動作する)の実現。。。と、夢は続き、広がります。来年度の研究成果に期待しましょう。

学長から一言:コロナ禍も何のその。。。工学部の実験室では、昨日も、今日も、明日も、地道なtry and errorが続けられているのですねッ!一歩一歩目標に近づいて、後輩に受け継ぐ。。。学生の皆さん、が・ん・ば・っ・て!これも福山大学のブランディング事業「里山・里海学」の一環!!!
この記事をシェアする
