【電気電子工学科】ロボティクス・メカトロニクス 講演会 2025 in Yamagata で発表しました
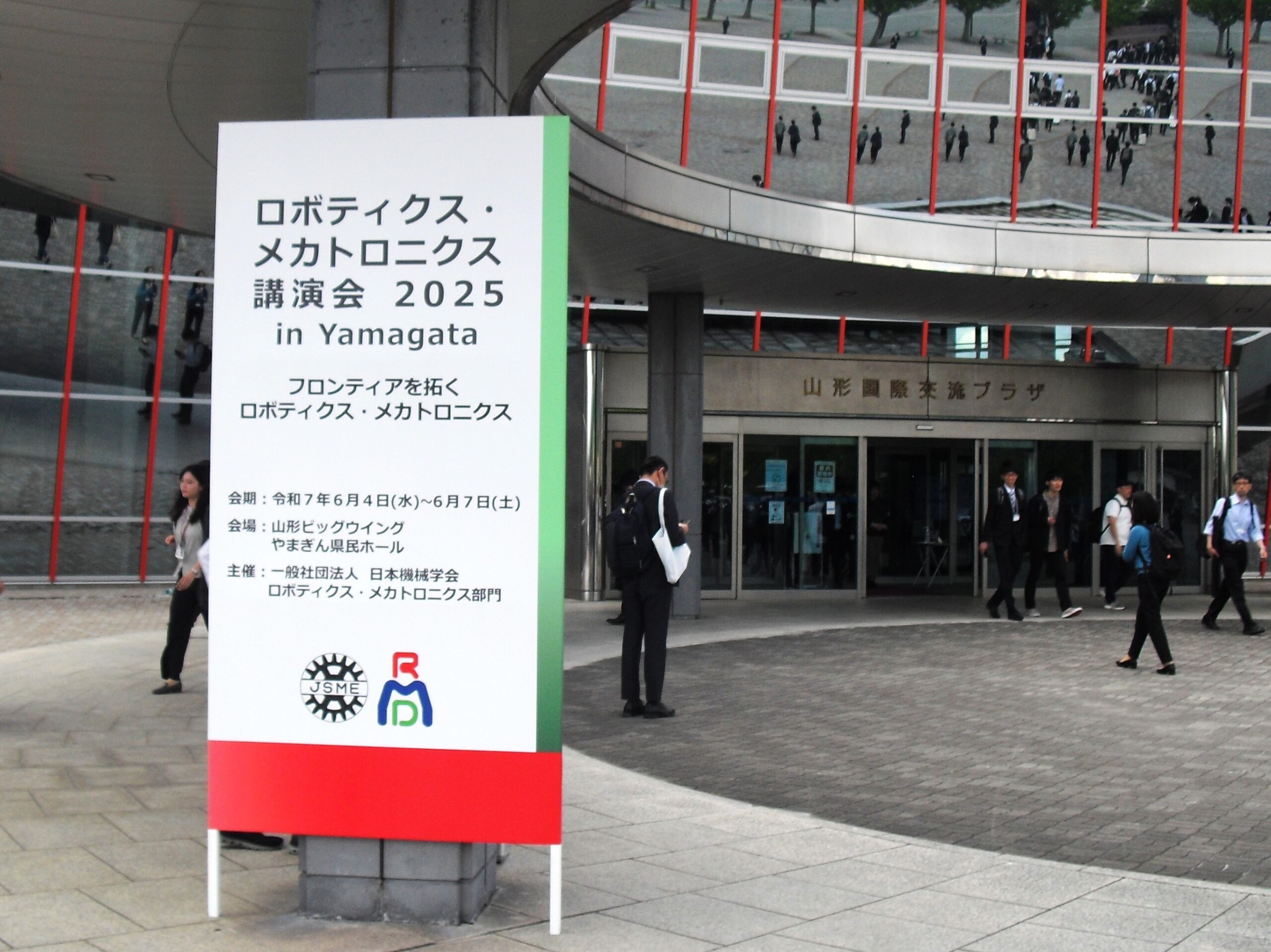
工学部電気電子工学科の伍賀です。6月4日(水)~7日(土)の日程で、一般社団法人日本機械学会ロボティクス・メカトロニクス部門主催のロボティクス・メカトロニクス 講演会 2025 in Yamagata が山形市の山形ビッグウイング(山形国際交流プラザ)で開催されました。この学会に、電気電子工学科からは沖准教授と私(伍賀)が参加しポスター発表をおこないましたので報告します。
この学会では、全国の大学や研究機関からロボティクス、機械工学、電気電子工学などに関する研究の成果が持ち寄られ、今回は1500件を超える発表があり、また企業展示ブースでは昨今話題の人型や動物型のロボットの動作デモンストレーションがあり、大変活気に満ちた大会でした。また、発表テーマのカテゴリは、医療福祉系ロボットや農業用、原発廃炉用などのアプリケーションに関するものから、機構と制御のようなロボットコントロールのソフトウェア技術、感覚と計測のようなセンシングに関する研究やデバイス開発に関するものなど、ロボット関連分野の多岐にわたります。
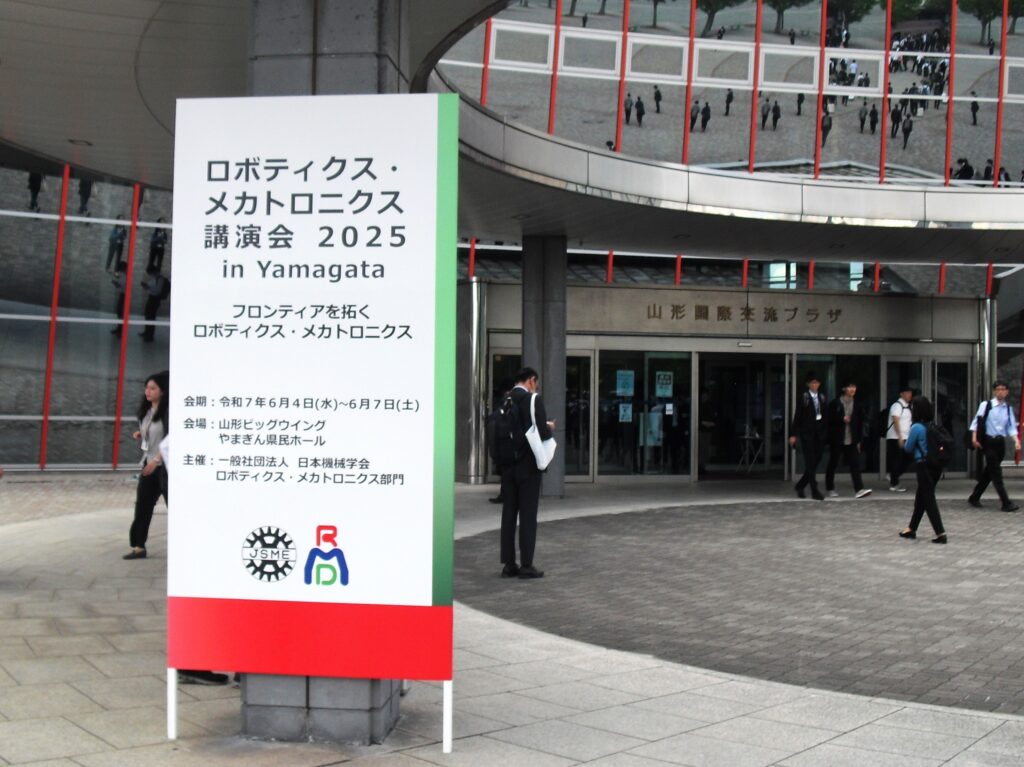
山形ビックウイング会場(山形市)
ここで我々は以下の発表を行いました。6月5日(木)午後のアクチュエータの機構と制御のセッションでの、沖准教授の発表は「膨張率の大きい風船を用いた水中深度制御に関する一考察」(沖)のタイトルで、福山大学ブランディング研究の一環として進められている里山・里海プロジェクトで開発している海中ROVの制御方法に関するものです。実際のロボット製作の実例に基づいた発表ですので、ロボットづくりに興味のある学生の皆さん、研究者の皆さんの興味を引き、活発な質疑応答がありました。
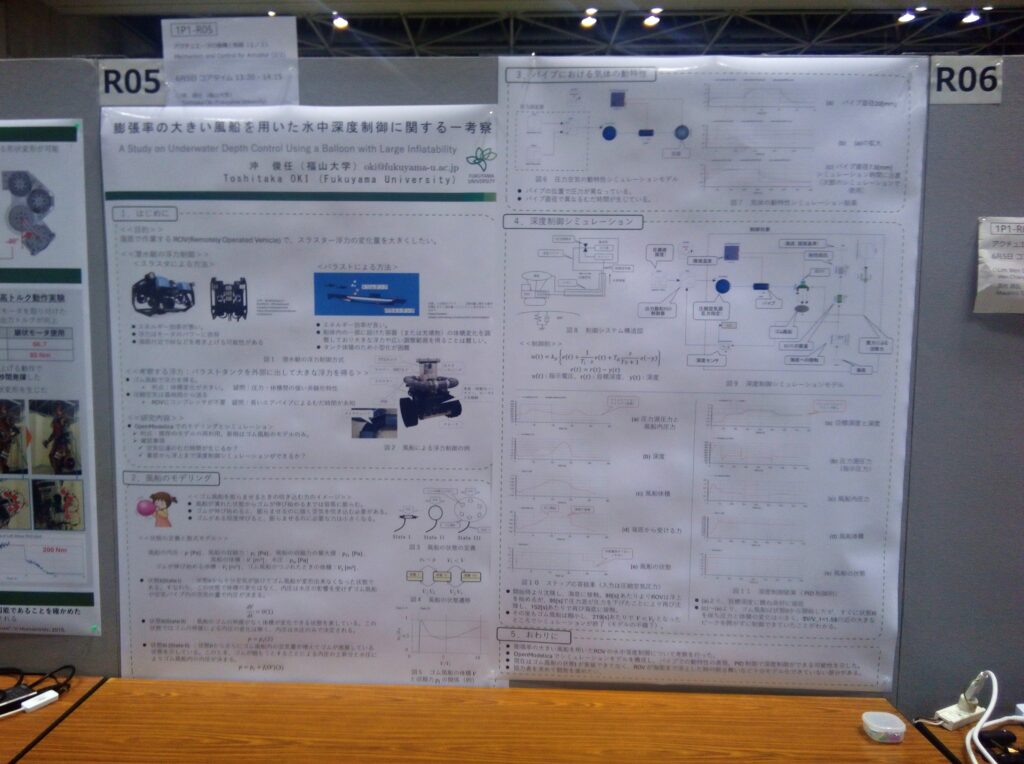
【ロボメカにおける基盤制御技術】アクチュエータの機構と制御セッションでの発表
ポスター発表での質疑応答の様子
次に、6月6日(金)午後のスワームシステムのセッションでの私の発表は、「実環境を指向したロボティックスワームの協調行動創発に関する研究」(伍賀,川上)のタイトルで、ゼミ生の川上翔大君が卒業研究で取り組んでくれた、群れのロボットの協調行動をまとめて発表しました。
この発表では、川上君のアイデアが盛り込まれたオリジナルのスワムロボットの個体を静態展示、PCで群れ行動のムービーを流し、ロボットコンテストなどに取り組んでいる学生の方に興味をもってもらいました。また、今回、著者の川上君は、スマホのミーティング機能を利用して、福山から山形会場に遠隔で参加してくれました。

会場には、研究室オリジナルのスワムロボットを展示

スマホ経由で参加してくれた川上君(大学院1年生)
今回の講演会は、全国の多数の大学、研究者の研究動向を肌で感じることができ、多くの研究者の方々と交流することもでき大変に実りの多い機会と感じました。西日本にある福山大学から、東北地方の山形市は移動も長時間かかり大変でしたが、普段は見れないようなもの、感じれないような空気が体験でき、今後の研究に活かせそうです。
下の写真のように、山形市の講演会会場から遠くに、出羽三山を望むことができました。6月上旬ですが、山頂にはまだ残雪があり、遠方まで来たことを実感できました。

学長から一言:電気電子工学科の教員・学生の皆さんが、山形で開催された日本機械学会ロボティクス・メカトロニクス部門主催の学会において、日頃の研究の成果を存分に発表できたようです。お疲れ様でした。ロボットに関する実に多様な内容の発表が盛り沢山の学会で、参加者との交流を通じて、自らの足らざるところや新たな研究のヒントも見つかったことでしょう。